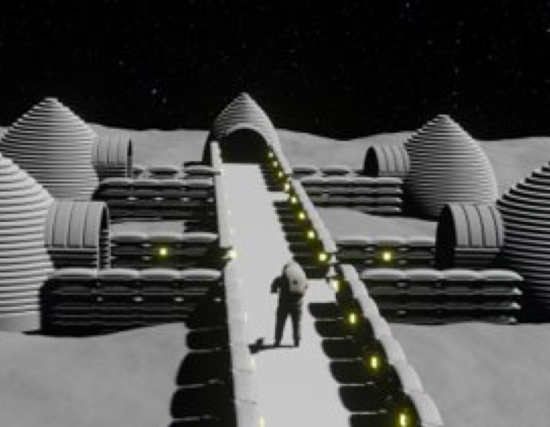
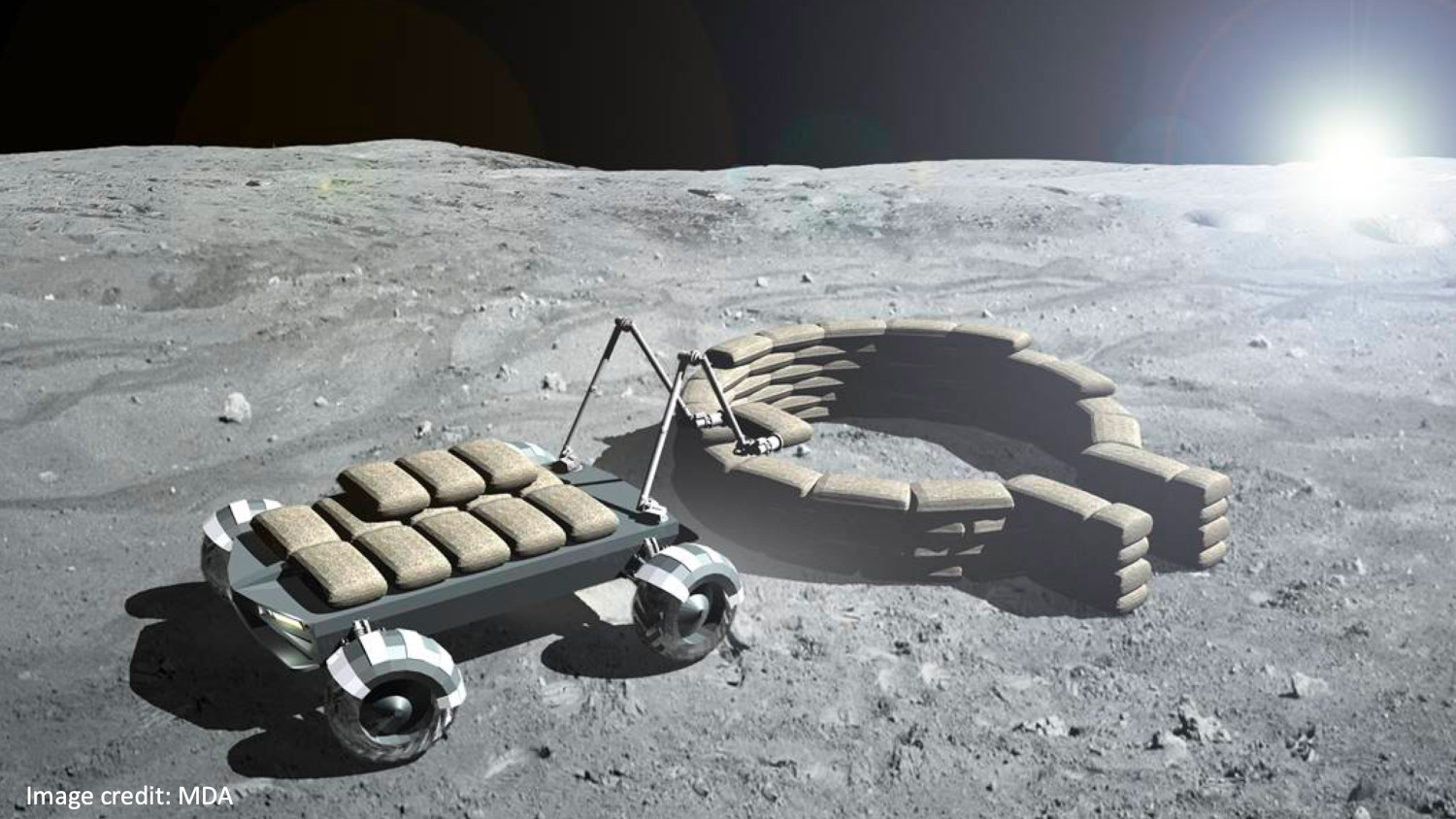
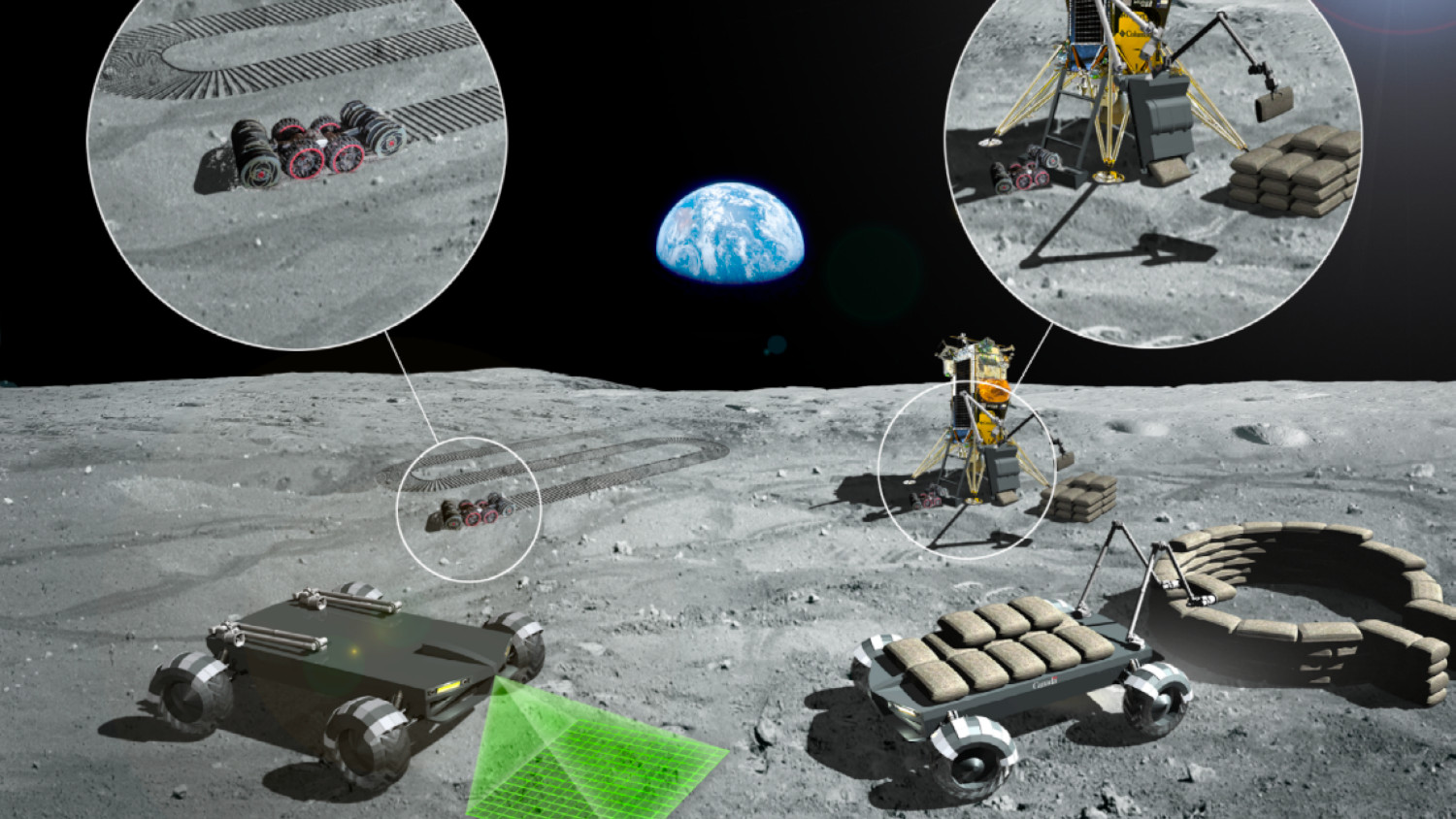
Lunar Robotically-Based Regolith Incorporated Construction (LUNAR BRIC) is a working group from NASA centres, Academia and Industry interested in pursuing ISRU-based technologies for the Lunar Surface. Research and technology developments are focused on enabling regolith filled bags as a modular construction unit for the larger Artemis base and beyond.
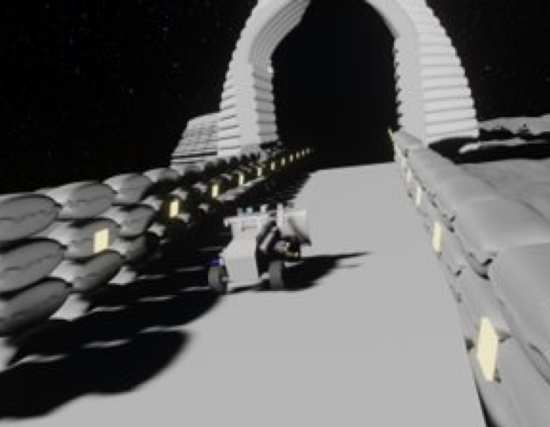
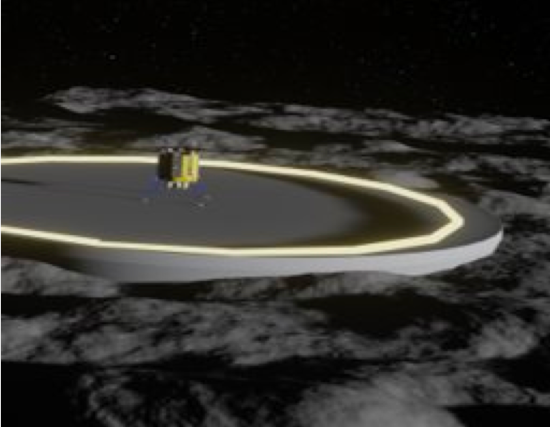
We have a diverse range of expertise including Robotics, Lunar Geology & Petrology, Optics, Geotechnical Engineering and Mission Design and our goal is to grow the Lunar Community for the use of regolith filled containment units (RCUs). We see this technology as but one piece in the Artemis base architecture, but one that will provide key support such as Radiation & Thermal Shielding, Base Illumination, Environmental Monitoring (through SmartBags), and Compute Protection .
















Interdisciplinary Expertise in Engineering, Science and Exploration












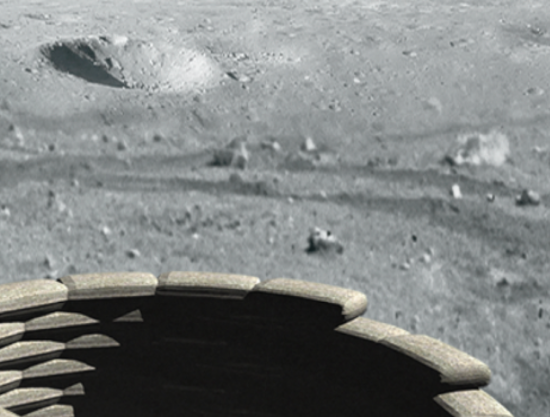
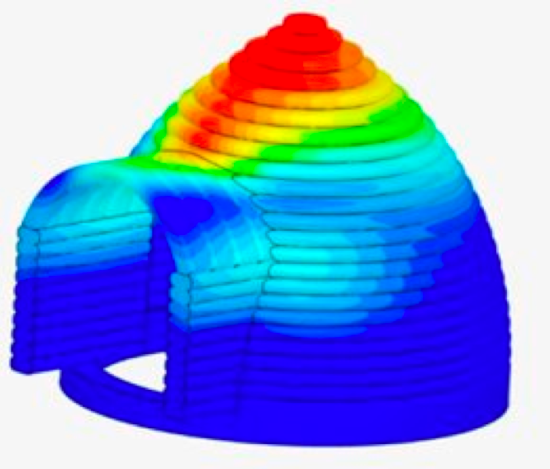
Employing Regolith Containing Units (RCUs) for extreme environments.
LUNAR BRICS provides protection from Radiation, Temperature Extremes & Dust Impingement.
LUNAR BRIC's SmartBags contain embedded technologies to measure a wide variety of factors.
LUNAR BRICS can provide illumination services and protect sensitive electronics from the harsh Lunar environment.